Table of contents
Ping Attributes to CSV
PING-Mapper will locate each sonar ping’s attributes for each available sonar channel. The attributes which PING-Mapper’s developers have reverse-engineered are documented below. The attributes are written to CSV and saved in the meta folder in the project directory. By selecting exportUnknown=True in main.py, attributes which have not been reverse-engineered are also exported to CSV for review.
| Attribute | Description |
|---|---|
| record_num | Unique ping identifier. |
| time_s | Time elapsed, in seconds, since the beginning of the sonar recording. |
| utm_e | Easting in meters (EPSG 3395). |
| utm_n | Northing in meters (EPSG 3395). |
| gps1 | GPS quality flag for heading (?): 0==bad; 1==good. |
| instr_heading | Heading in tenths of a degree. |
| gps2 | GPS quality flag for speed (?): 0==bad; 1==good. |
| speed_ms | Vessel speed from GPS in meters/second. |
| inst_dep_m | Sonar sensor depth estimate in meters. |
| volt_scale (?) | Voltage in tenths of a volt. |
| f | Sonar frequency in kHz |
| ping_cnt | The number of returns for a given ping. Larger values proportional to larger range settings. |
| index | Byte offset for beginning of ping in the SON file. |
| chunk_id | The chunk that a given ping belongs to, as determined by the nchunk setting. |
| lon | Longitude in WGS 1984. |
| lat | Latitude in WGS 1984. |
| e | Easting in recording’s local UTM zone. |
| n | Northing in recording’s local UTM zone. |
| tempC | Water temperature provided by tempC parameter. |
| pix_m | Pixel size of a single ping return in meters. |
| date | Date of sonar recording. |
| time | Time of sonar ping. |
| orig_record_num | Sonar recordings will often have missing pings (see Issue #33). There is an option for PING-Mapper to locate and flag missing data by setting fixNoDat to True. This will insert a placeholder line in the ping attribute CSV using data from another ping, as identified by orig_record_num. If record_num != orig_record_num, then a missing ping has been identified. This information is used during sonogram image export to insert NoData in the appropriate location, ensuring ping’s are properly geographically located. |
| dep_m | Final depth in meters. This value is based on the depth detection method used, whether depth estimates are smoothed, and if any additional pixel-wise adjustments are made. |
| dep_m_Method | The method used to derive dep_m, as given by the detect_dep parameter: 0=Use sonar sensor depth estimate; 1=Use Residual U-Net model for depth estimate and water column segmentation (Recommended); 2=Use binary thresholding for depth estimate and water column segmentation. |
| dep_m_smth | Option to smooth the depth estimates, as specified by smthDep. |
| dep_m_adjBy | Option to make additional pixel-wise adjustments to final depth estimate, as specified by adjDep |
Sonogram Tiles
Export of non-rectified sonogram tiles is controlled with the wcp and wcr parameters. These exports are further controlled with depth detection and shadow removal settings.
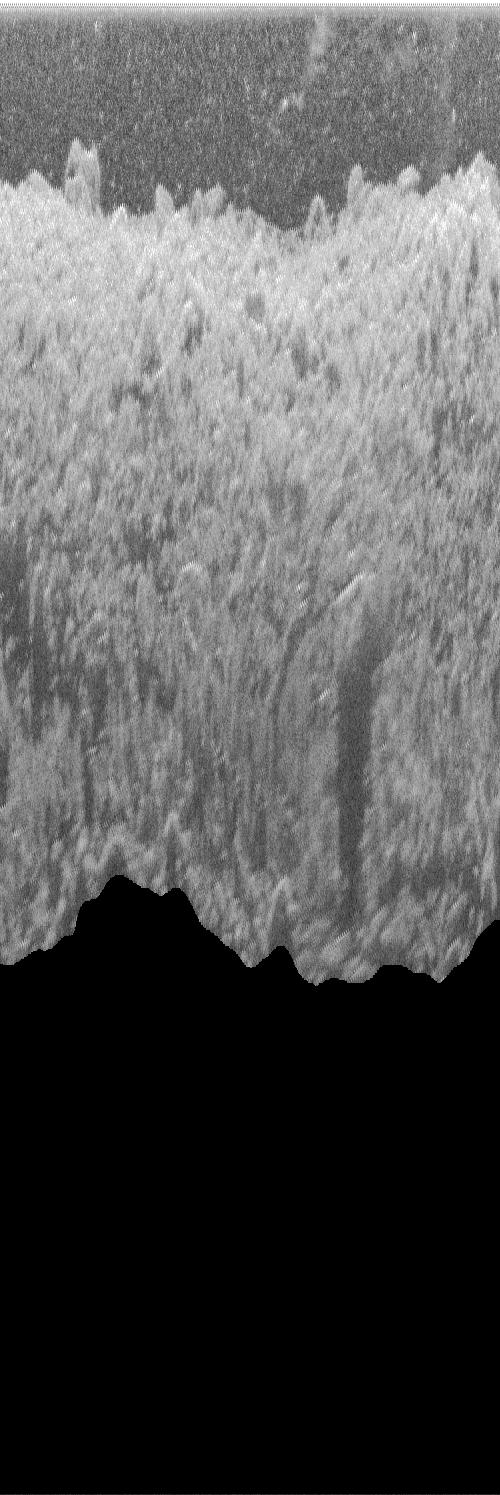
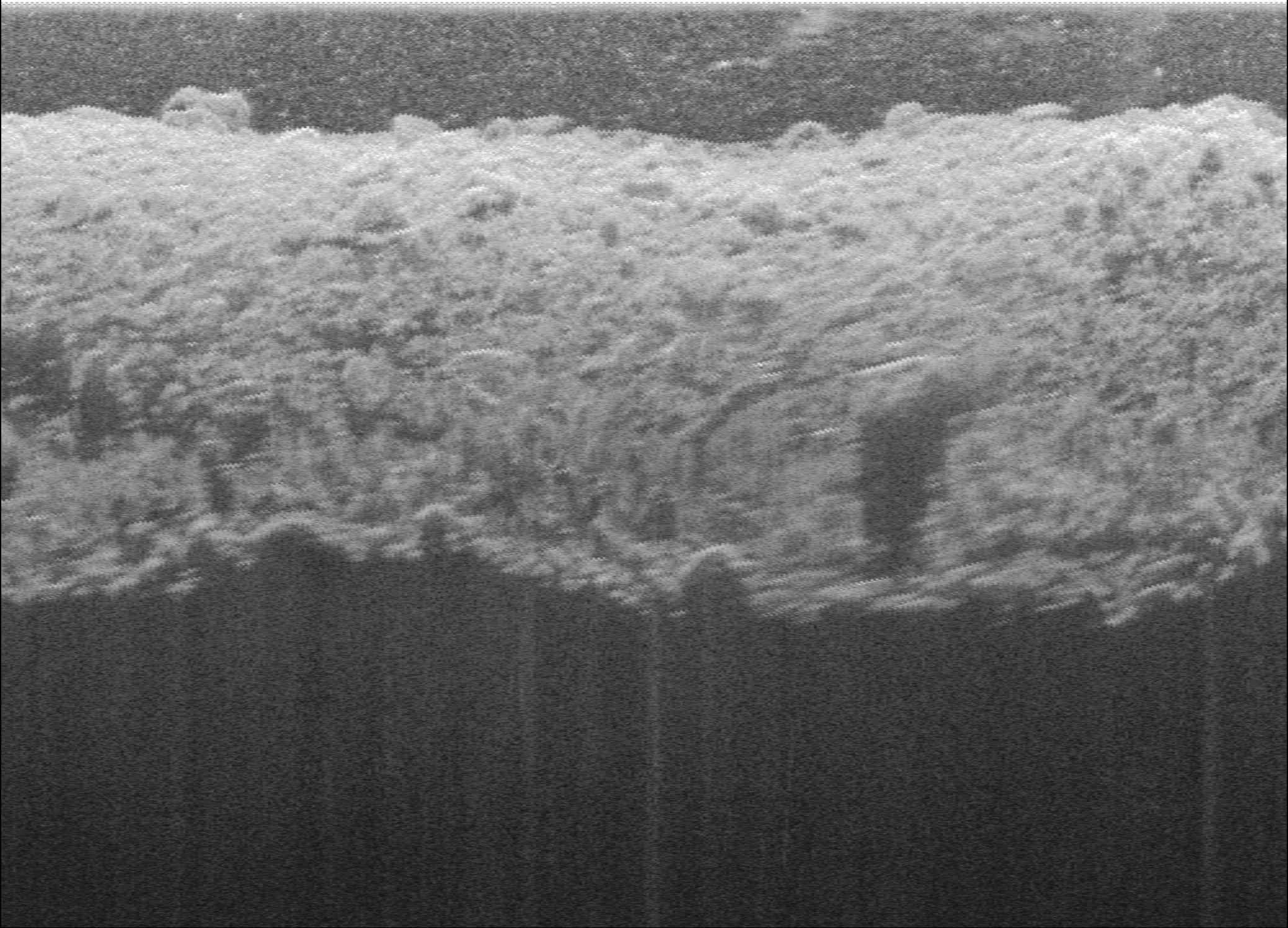
Water Column Present
wcp=True
remShadows=0

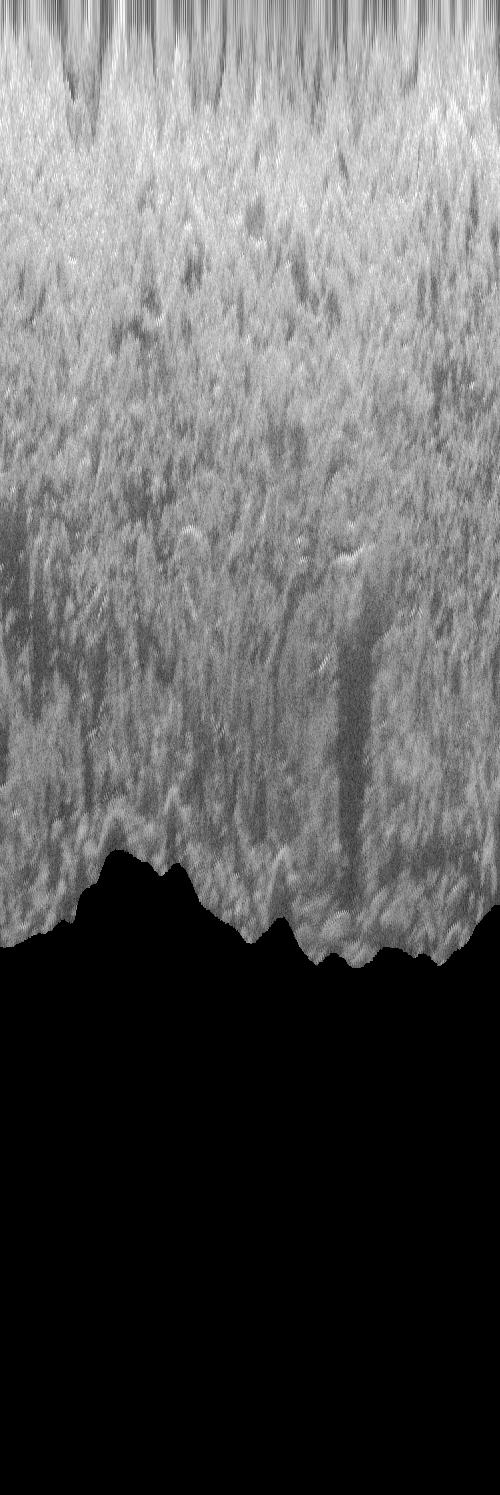
Shadows in the far-field can be segmented and removed by specifying remShadows=2 (Remove shadows in far-field only). This model will improve with future software releases.
wcp=True
remShadows=2
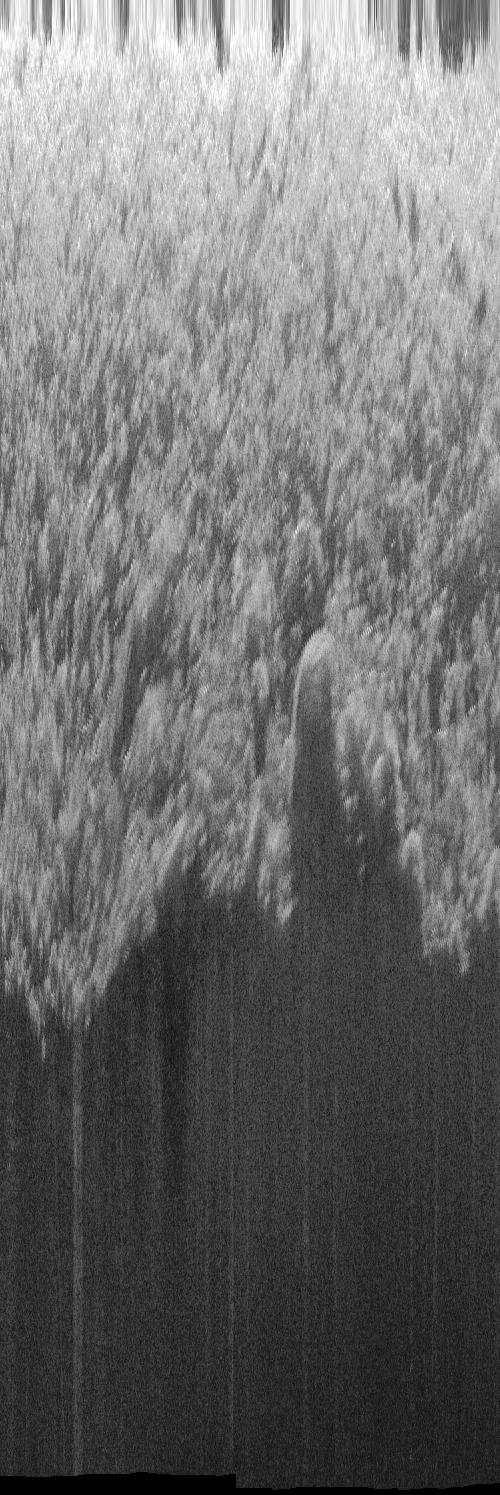
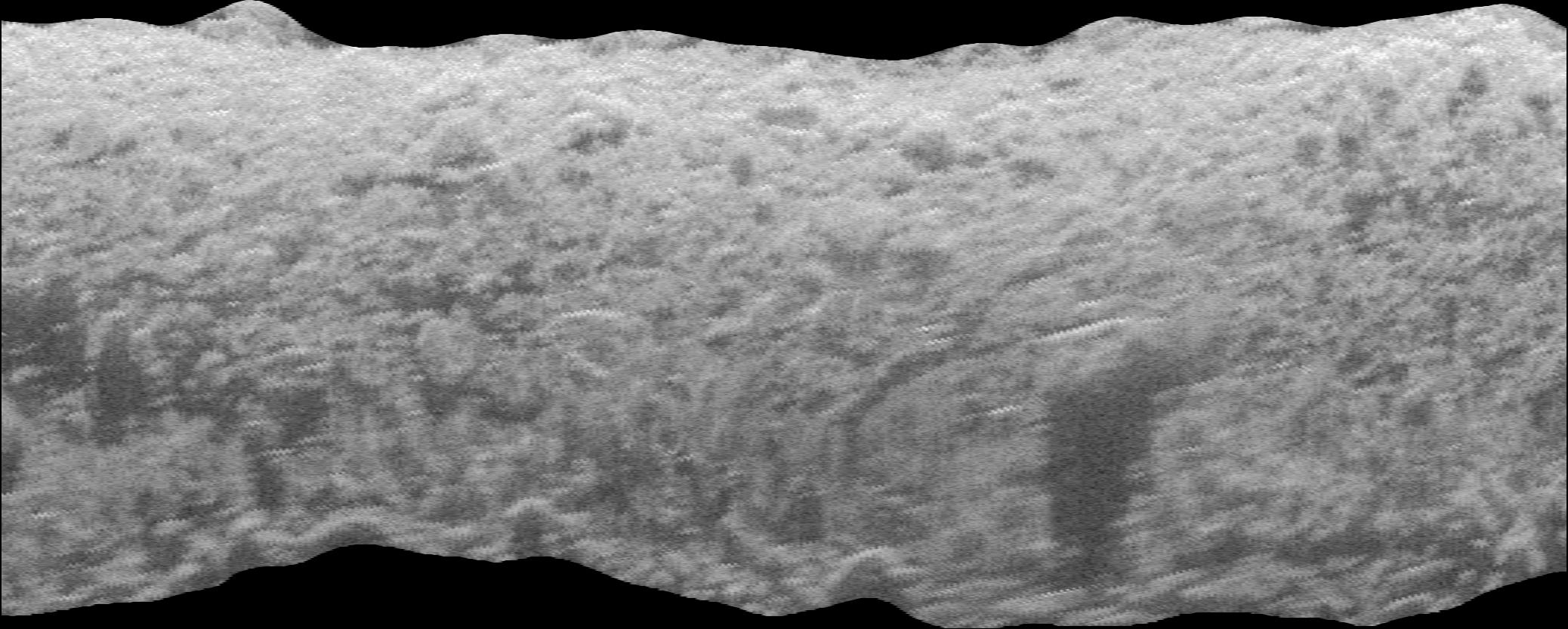
Water Column Removed
The water column can be removed by setting wcp=True and selecting desired detection method. Once the water column is removed, pixels are relocated using a flat bottom assumption.
wcr=True
detectDep=0
remShadows=0
Shadows in the far-field can be segmented and removed by specifying remShadows=2. This model will improve with future software releases.
wcr=True
detectDep=1
remShadows=2
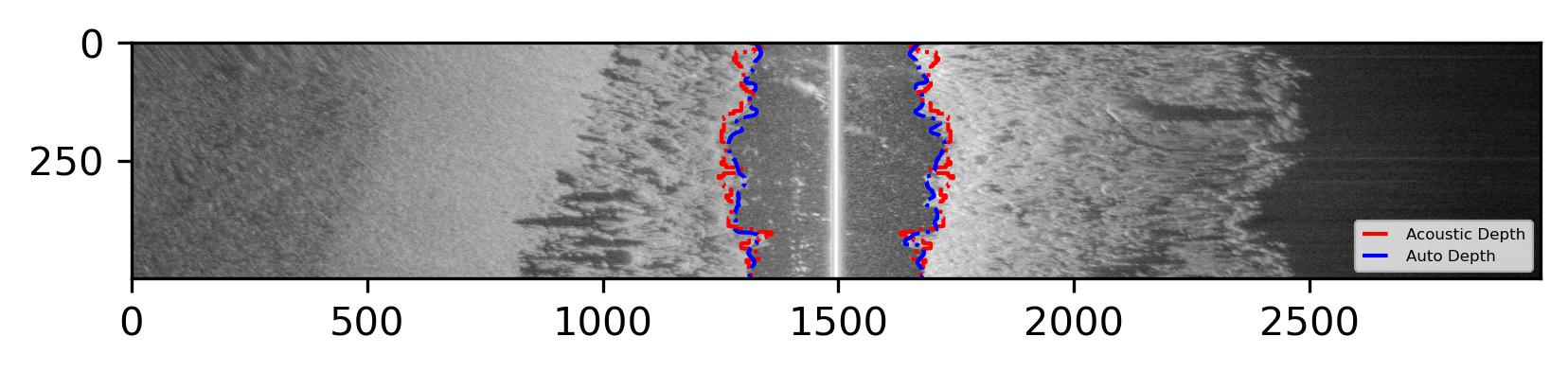
Bedpick Plots
Plots of the bedpick are exported to compare the sonar sensor depth estimate to the automated bedpicks.
detectDep = 1
pltBedPick = True
Speed Corrected & Along-Track Stretched Sonogram
Speed Corrected
Speed corrected sonogram with water column and shadows present:
lbl_set = 1
spdCor = 1
maxCrop = True
remShadow = 0
detectDep = 0
Speed corrected sonogram with water column and shadows removed:
lbl_set = 2
spdCor = 1
maxCrop = True
remShadow = 2
detectDep = 1
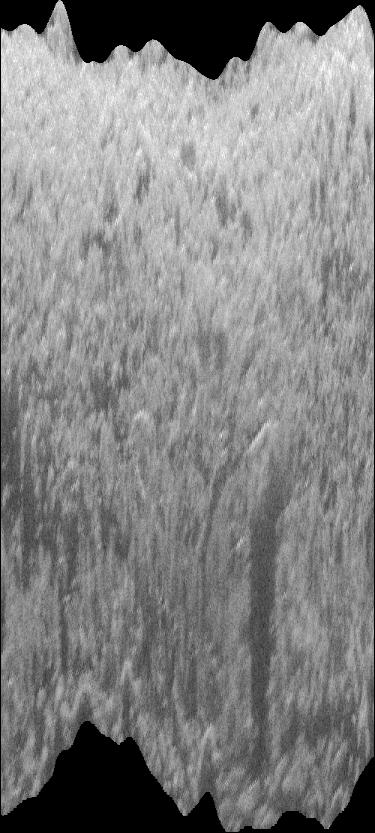
Along-Track Stretch
Stretch factor of 0.75 with water column and shadows removed:
lbl_set = 2
spdCor = 0.75
maxCrop = True
remShadow = 2
detectDep = 1
Stretch factor of 10 with water column and shadows removed:
lbl_set = 2
spdCor = 10
maxCrop = True
remShadow = 2
detectDep = 1

Georectified Mosaics
Sonograms can be georectified and mosaicked and brought into a GIS for additional analysis. Either the sonar sensor depth estimate or the automated depth estimates can be used for water column removal and slant range correction.
Water Column Present
Mosaics with the water column present can also be exported, however, these mosaics are not geographically correct due to the presence of the water column.
rect_wcp=True

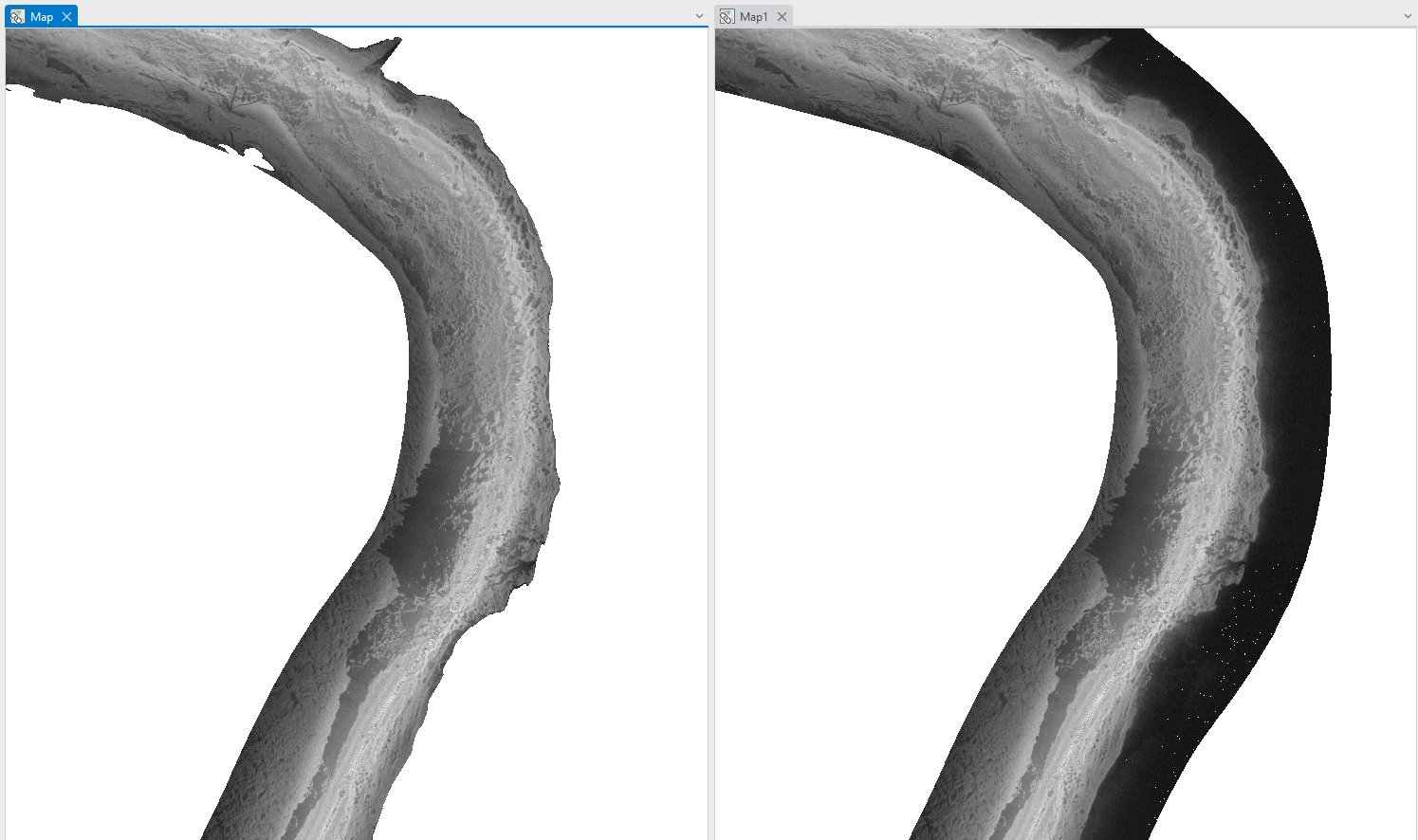
Water Column Removed
The two panels show mosaics with water column removed. The left panel shows the mosaic with shadows removed in contrast to the right panel with shadows preserved.
# Left Panel
rect_wcr=True
detectDep=1
remShadow=2
mosaic=1
# Right Panel
rect_wcr=True
detectDep=1
remShadow=0
mosaic=1